Structure From Motion (SFM) is a photogrammetric technique for creating orthophotos and 3D models of the earth surface from overlapping photographs. The photographs can be acquired from various platforms such satellite, airplane or the now ubiquitous drones. Just as humans gauge depth through line of sight, computer algorithms establish lines of sight to key object points from various perspectives. When these lines intersect, they calculate 3D coordinates for a specific point, which can be integrated with other point coordinates to generate a point cloud.
Lidar stands for light detection and Ranging also called 3D laser scanning. It is an active remote sensing techniques for measuring elevation across wide areas. The scanner emits pulses of laser light towards an object and the time taken for the light to bounce back determines the distance to the object. The figure below is a sketch of an Airborne Laser Scanning (ALS) system.
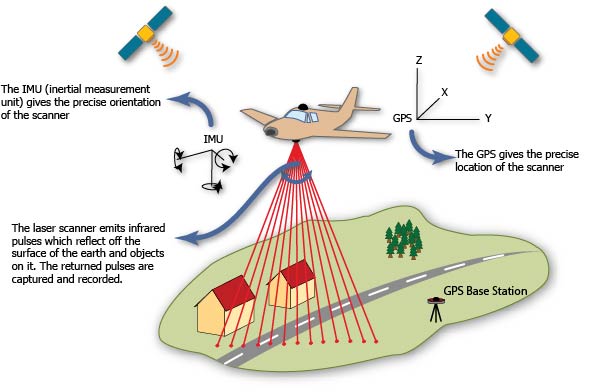
- Source: https://gmv.cast.uark.edu/scanning-2/airborne-laser-scanning/
Lidar records two types of data- Range distance and Intensity. Range is a function of two-way travel time to ground and back. Intensity is the fraction of photons returned controlled by material properties.
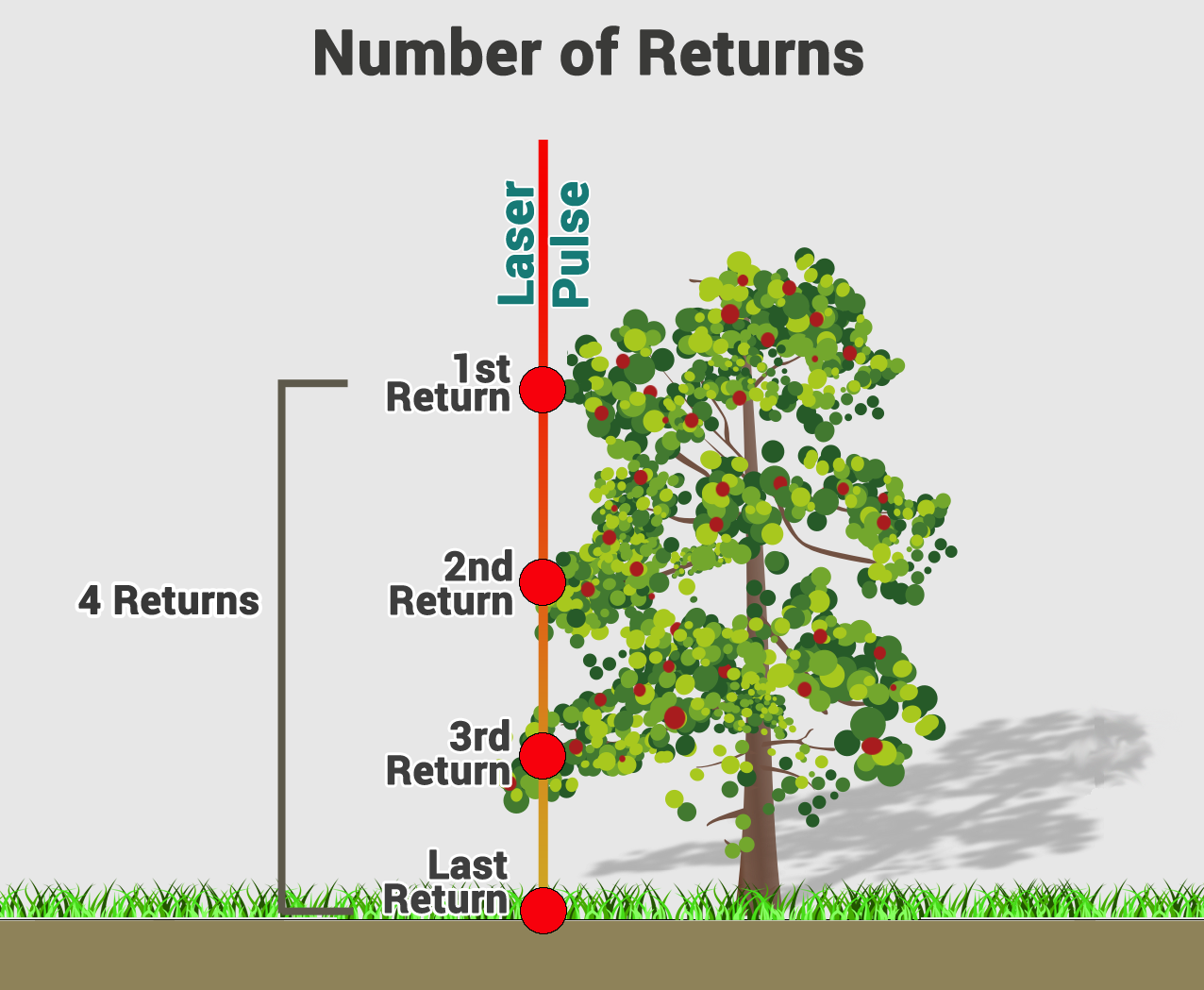
Each lidar pulse yields multiple returns. The number and complexity of returns provide information about the surface material.

- source: GISGeography
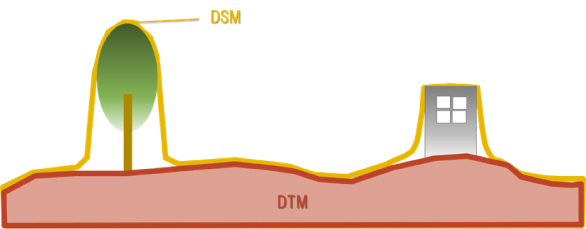
Depending on the feature the point return is coming from, elevation models can be Digital Terrain Model (DTM) or Digital Surface Model (DSM). DTM is the three-dimensional representation of the terrain without natural or man-made objects. DSM is a three-dimensional representation of the heights of the Earth’s surface, including natural or man-made objects located on it.
- Source: https://www.aw3d.jp/en/glossary/